はじめに
スマートフォンのカメラで通行人や車両をリアルタイムにカウントするアプリ「ミチミエール」を個人開発しました。
本記事ではアプリの利用方法および、高精度な物体検出とアルゴリズムによるトラッキングを実装し、30-60 FPS のリアルタイム処理を実現するまでの技術的な全貌を解説します。
アプリ情報:
- 公式サイト:
- App Store:
- Google Play:
なぜこのアプリを作ったのか
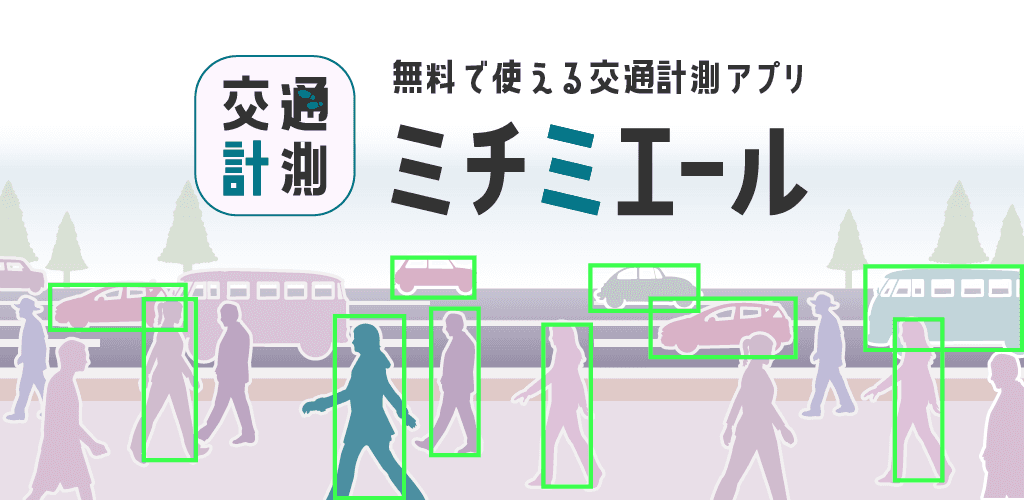
道路の交通量調査やイベント会場の来場者数カウントは、従来は人手による目視カウントや高額な専用機器が必要でした。
「スマートフォン1台で、誰でも簡単に通行量を計測できるアプリがあれば便利なのでは?」
この素朴な疑問から、AI を活用した通行量カウントアプリの開発をスタートしました。
主な用途:
- 道路の交通量調査
- 歩行者通行量の計測
- イベント会場の来場者数カウント
- 商業施設の入退場管理
- 都市計画のためのデータ収集
アプリの利用方法
アプリをストアからインストールして、アカウント作成後計測開始を押すとすぐに利用可能です。
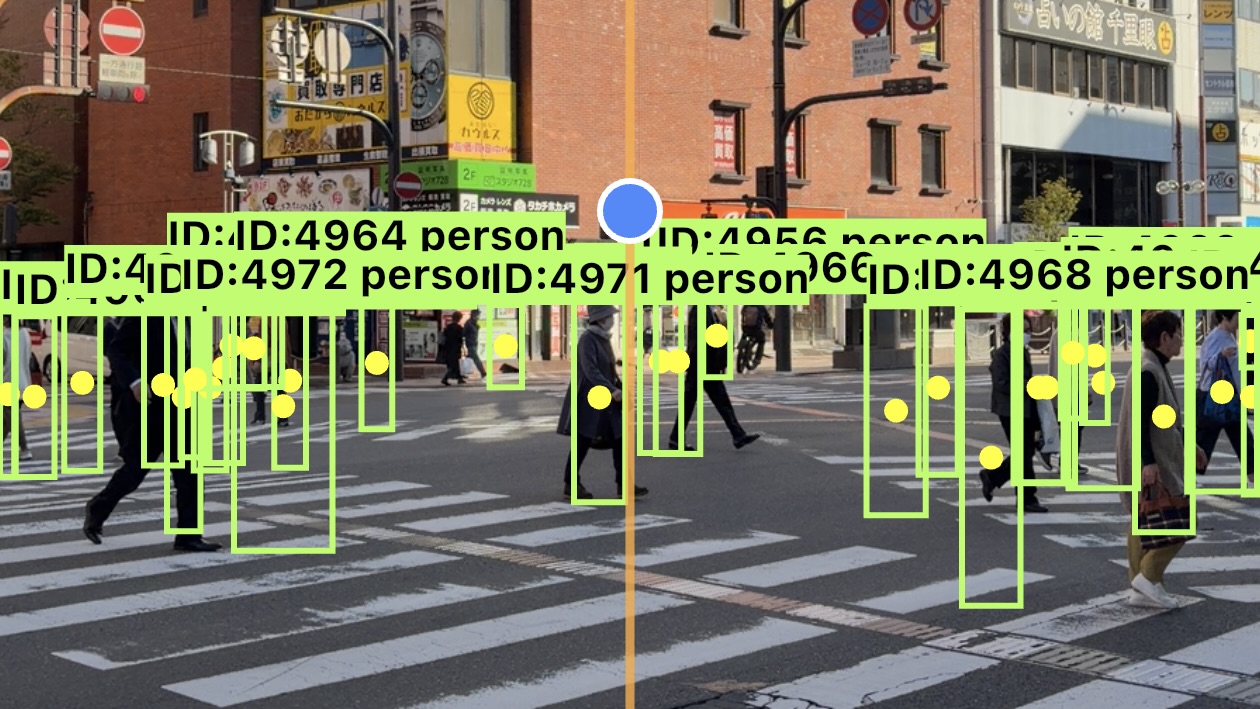
交通量計測中のスクリーンショット
オレンジ色の線をまたぐとカウントアップ。オレンジ色の線はドラッグで360度回転できるので横方向だけでなく縦方向(手前から奥に人や車が移動する)でも計測可能。
アプリの概要
- 端末で処理が完結するため無料で利用できる
- 複数端末での計測を一つの端末で管理できる
- 記録したデータはクラウドに保存される
- 他の人が計測したデータが閲覧できる
端末で処理が完結するため無料で利用できる
端末で30-60 FPS のリアルタイム処理を実現することでサーバーでの処理を0(ゼロ)にし無料で提供できるようになった。(かかった費用は私の人件費のみ)
複数端末での計測を一つの端末で管理できる
複数の場所で同時計測を想定し、計測中の端末をモニタリングする機能を実装。
リアルタイムで計測中の端末のデータを閲覧することができる。
他の人が計測したデータが閲覧できる
せっかくなので他の人が計測したデータを閲覧できるようにした。
今後有料オプションとして非公開にする機能などを実装できればよいなと思案中
アプリについての Q&A
Q:導入にどれくらい時間がかかりますか?
A:アプリをインストールしてすぐ利用できます
Q:プラットフォームはどこですか?
A: iOSおよびAndroid に対応しています
Q:どこからインストールできますか?
A App Store および Google PlayStore からインストールできます。
Q:計測できる対象は?
A:人物、自動車、バイク、犬に対応しています。
Q:どれくらいの通行量まで可能ですか?
A:端末のスペックによりますが、iPhone 13 での計測で同時に50検体まで可能です。
Q:計測した通行量データはエクスポートできますか?
A:はい可能です。PDF,JSON,CSV でのエクスポートに対応しています。
Q:計測時に個人情報を収集しますか?
A:いいえ、通行量データのみ保存しますので、個人を特定する情報や画像などは保存されません。
技術概要
主な実装内容:
- YOLO11モデル(TensorFlow Lite)の Flutter 統合
- Kalman Filter + Hungarian Algorithm による高精度トラッキング
- ライン通過判定による重複なしカウント
- Firebase 連携によるデータ管理
- 30-60 FPS のリアルタイム処理
技術スタック:
アーキテクチャ全体像
YOLO11のモバイル実装
1. モデル選定とサイズ比較
YOLO11には複数のモデルサイズがあり、精度と速度のトレードオフを考慮して選択する必要があります。
| モデル | サイズ | 推論速度 (iPhone 14 Pro) | 精度 (mAP) |
|---|---|---|---|
| yolo11n | 5.8 MB | ~60 FPS | 普通 |
| yolo11s | 21 MB | 30-45 FPS | 良好 |
| yolo11m | 49 MB | 20-30 FPS | 高精度 |
本アプリでは、**yolo11s(スモール)を標準モデルとして採用。ユーザーは設定からyolo11m(ミディアム)**に切り替えて高精度モードも利用可能です。
2. TensorFlow Lite への変換
YOLO モデルをモバイルで動かすには、TensorFlow Lite 形式への変換が必要です。
モデル変換のコード例:
エクスポートされるファイル:
yolo11s.tflite(21 MB)labels.txt(クラスラベル)
これらを assets/ ディレクトリに配置し、pubspec.yaml で登録します。
3. Flutter への統合
ultralytics_yolo パッケージを使用して YOLO を統合します。
Flutter での実装例:
4. 検出結果の処理
YOLO からの検出結果を受け取り、トラッカーに渡します。
検出結果の処理コード:
ポイント:
- 低信頼度の検出でも、既存トラックと IoU が高ければ受け入れる(追跡の継続性)
- 座標変換:カメラ座標系 → 画面座標系の変換が必要
高精度トラッキングの実装
物体検出だけでは、フレーム間で ID が変わってしまい、同一の人物を追跡できません。ここでトラッキングが必要になります。
トラッキングの目的
- ID の安定化:同一物体に一意の ID を割り当て続ける
- オクルージョン対応:一時的に見えなくなっても追跡を継続
- 重複排除:同じ物体を複数回カウントしない
アルゴリズム選定:Kalman Filter + Hungarian Algorithm
DeepSORT 風のアルゴリズムを採用しました(外観特徴なし)。
構成要素:
- Kalman Filter:物体の運動モデルで次フレームの位置を予測
- Hungarian Algorithm:検出とトラックの最適割り当て
- トラックライフサイクル:Tentative → Confirmed → Deleted
実装の全貌
以下、トラッカーの核心部分の実装です。
1. Kalman Filter による予測
実装コード:
2. マハラノビス距離によるゲーティング
検出とトラックの関連付けの前に、マハラノビス距離でフィルタリングします。
ゲーティングの実装:
マハラノビス距離が閾値(デフォルト: 9.4877)を超える場合、その検出は候補から除外されます。
3. コスト行列の構築
コスト計算の実装:
パラメータ:
lambdaCost = 0.7:IoU を重視(0に近いと運動モデル重視)iouMin = 0.01:最小 IoU 閾値gateThreshold = 9.4877:カイ二乗分布の5%点(自由度4)
4. Hungarian Algorithm(ムンクレス法)
コスト行列から最適割り当てを求めます。
Hungarian アルゴリズムの実装:
Hungarian Algorithm により、グローバル最適な割り当てが得られます。
5. トラックのライフサイクル管理
パラメータ(15fps 環境に最適化):
minHits = 1:確定に必要な連続ヒット数maxAge = 90:見失い許容フレーム数(6秒)
ライン通過判定アルゴリズム
トラッキングだけでは「いつ、どの方向に通過したか」が分かりません。ここでライン通過判定を実装します。
基本原理
画面上に仮想ラインを設定し、トラックの重心がラインを符号変化して通過したときにカウントします。
実装のポイント
1. 符号付き距離の計算
ライン定義のコード:
2. 重心の平滑化(EMA)
フレーム間のノイズを除去するため、**指数移動平均(EMA)**で重心を平滑化します。
EMA 平滑化の実装:
smoothingAlpha = 0.7:現在値を70%、過去値を30%の重みで合成
3. 通過判定の条件
符号が変わっただけではカウントしません。以下の条件をすべて満たす場合にカウントします。
通過判定のロジック:
パラメータ(15fps 環境に最適化):
minDeltaNormalized = 0.003:微小移動フィルタminCrossingDistanceNormalized = 0.008:最小通過距離cooldownFrames = 20:カウント後のクールダウン(約1.3秒)
4. クールダウン機構
同じトラックが短時間で複数回カウントされるのを防ぐため、カウント後に一定フレーム数のクールダウンを設けます。
クールダウンの実装:
パフォーマンス最適化
達成した性能指標
| 項目 | 値 |
|---|---|
| FPS | 30-60(デバイス性能に依存) |
| 平均レイテンシ | 50-100ms |
| メモリ使用量 | 200-400MB |
| モデルサイズ | yolo11s: 21MB / yolo11m: 49MB |
最適化のポイント
1. GPU 使用の有効化
GPU を使用することで、推論速度が2-3倍向上します。
2. フレームレートの制限
60fps で処理してもバッテリーを消費するだけなので、30fps に制限。
3. 座標変換の最適化
カメラ座標系から画面座標系への変換は毎フレーム実行されるため、計算を最適化します。
座標変換の実装:
4. トラッキングパラメータのチューニング
15fps 環境(低速デバイス)でも安定動作するようパラメータを調整しました。
通常の DeepSORT(30fps 想定)の値から、フレーム数を倍に調整しています。
5. ステート最小化
不要な状態変更を減らし、Widget 再ビルドを最小限に抑えます。
苦労した点と解決策
1. カメラ座標系の不一致
問題: YOLO の検出座標と Flutter の画面座標が一致せず、バウンディングボックスがズレる。
原因:
- カメラのアスペクト比(4:3)と画面のアスペクト比(9:16)が異なる
- iOS と Android で座標系が異なる
- 画面の向き(Portrait/Landscape)で変換が変わる
解決策:
normalizedBox(0.0〜1.0の正規化座標)から逆算してカメラ解像度を推定し、Aspect Cover でマッピング。
カメラサイズ推定の実装:
2. トラッキング ID の不安定性
問題: 人が重なったり、一時的に見えなくなると、ID が変わってしまう。
解決策:
maxAge = 90(6秒)に設定し、長時間の見失いに対応- マハラノビス距離ゲーティングで、運動モデルに基づく予測を活用
- IoU 閾値を
0.1まで下げ、大きくズレた検出でもマッチング可能に
3. 重複カウント
問題: 同じ人が複数回カウントされてしまう。
解決策:
- クールダウン機構:カウント後20フレーム(約1.3秒)は同じ ID をカウントしない
- 通過距離の閾値:ライン法線方向に一定距離以上移動した場合のみカウント
- 微小移動フィルタ:ノイズによる誤検出を除去
4. モデル切り替え時のクラッシュ
問題: yolo11s ↔ yolo11m を切り替えると、iOS でカメラがクラッシュする。
解決策:
古いコントローラーを完全に停止してから、1秒待ってから新しいコントローラーを起動。
モデル切り替えの実装:
5. バックグラウンド移行時のデータ保存
問題: アプリをバックグラウンドに移行すると、計測データが失われる。
解決策:
WidgetsBindingObserverでライフサイクルを監視し、pausedやdetached状態になったら自動保存。
ライフサイクル監視の実装:
実装の成果
定量的な成果
- FPS: 30-60(デバイス依存)
- トラッキング精度: IoU 0.7以上で安定追跡
- カウント精度: 目視カウントとの誤差 5%以内(テスト環境)
- バッテリー消費: 30分の連続使用で約15%消費(iPhone 14 Pro)
定性的な成果
- スマホ1台で計測可能:専用機器不要
- リアルタイムフィードバック:計測中に結果を確認できる
- 低コスト:アプリは無料、追加費用なし
- データ保存:Firebase 連携で自動保存・複数デバイス同期
ユーザーの声
「今まで手作業で数えていた通行量調査が、スマホを置くだけで自動化できるので便利」
「イベント運営で来場者数をリアルタイムに把握できるのが便利」
学んだこと
技術面
- YOLO + トラッキングの深い理解:検出とトラッキングは別物
- Kalman Filter の実装:線形代数の実践的応用
- Hungarian Algorithm:組合せ最適化の重要性
- モバイル AI の制約:メモリ、バッテリー、速度のトレードオフ
- 座標変換の難しさ:カメラ座標系の理解が必須
開発面
- プロトタイプ → 最適化 → リファクタリングの反復
- パラメータチューニングの重要性:デフォルト値の影響は大きい
- デバッグログの活用:フレームごとの状態を可視化
- テストの自動化:単体テストでバグを早期発見
- ドキュメントの整備:未来の自分へのメモ
個人開発
- 小さく始めて改善する:完璧を目指さない
- ユーザーフィードバックの重要性:想定外の使い方を知る
- オープンソース活用:車輪の再発明をしない
- コミュニティの力:Flutter/Dart コミュニティに感謝
参考資料
論文・文献
- YOLO11 - Ultralytics
- Simple Online and Realtime Tracking (SORT)
- Deep SORT
- BoT-SORT: Robust Associations Multi-Pedestrian Tracking
- Kalman Filter Tutorial
ライブラリ・ツール
コミュニティ
おわりに
「スマホで通行量をカウントする」というシンプルなアイデアから始まった開発でしたが、YOLO11の統合、Kalman Filter によるトラッキング、ライン通過判定など、多くの技術的挑戦がありました。
個人開発ならではの自由さで、試行錯誤を繰り返しながら、30-60 FPS のリアルタイム処理を実現できたことは大きな達成感です。
この記事が、Flutter で AI を活用したアプリを開発したい方や、物体検出・トラッキングに興味がある方の参考になれば幸いです。
ミチミエールは現在、App Store / Google Play で無料公開中です。ぜひダウンロードして、実際に使ってみてください!
アプリのダウンロード
- App Store:
- Google Play:
- 公式サイト:
お問い合わせ・フィードバック
公式サイト(https://michimieru.com)のお問い合わせフォームからご連絡ください。
ご意見・ご感想・バグ報告など、お気軽にお寄せください!
#Flutter #YOLO #AI #機械学習 #物体検出 #個人開発 #アプリ開発 #Firebase #モバイルアプリ #技術記事 #iOS #Android #TensorFlow #画像認識 #ディープラーニング #Dart #リアルタイム処理 #Kalman Filter #トラッキング #コンピュータビジョン